
CAN-шина
CAN – стандарт обмена информации промышленной автоматики, призванный объединить в единое сообщество все многообразие электронного оборудования.
Протокол разработан на основе стандартов ISO передачи данных.
В середине 80-х годов прошлого столетия компании Intel и Robert Bosch GmbH разработали цифровое устройство для обмена данных, которое стало стандартом автомобильной
электроники.
Подобно тому, как собираются в единую сеть несколько компьютеров, CAN собирает в цепь все электронные блоки автомобиля. Это делает управление более надежным, быстрым и эффективным. Кроме того, через кабель CAN происходит обмен данными между ЭБУ и сторонними электроприборами, что делает диагностику автомобиля максимально точной и быстрой.
Особенности устройства CAN-шины
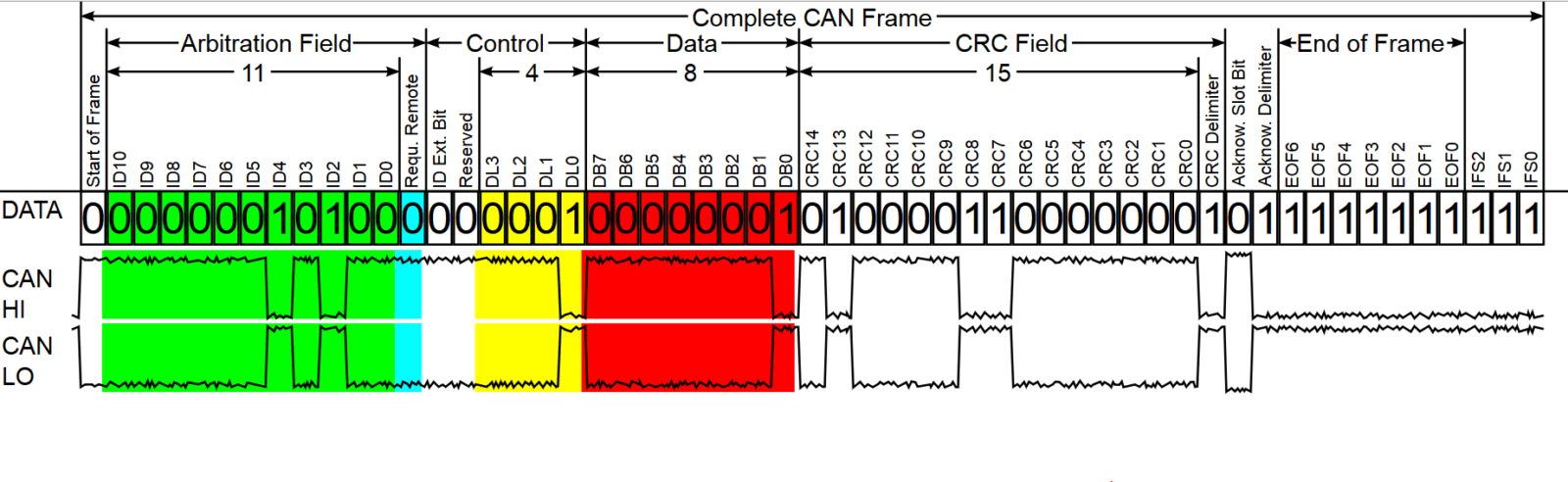
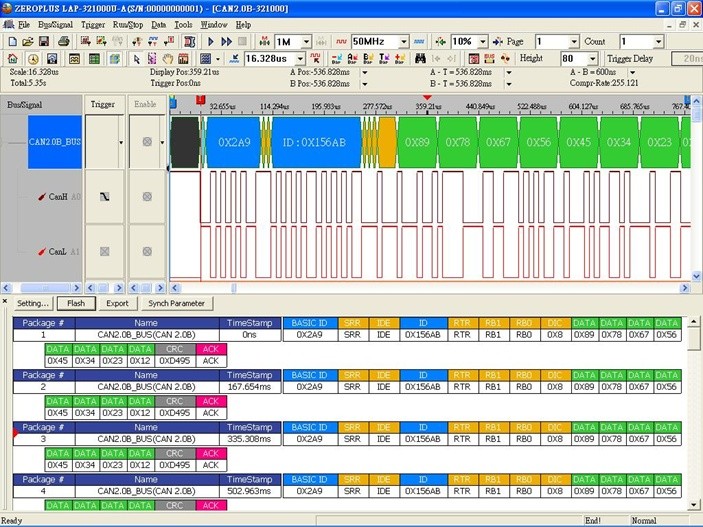
Передаются данные, со скоростью 1Мбит/сек, по радиоканалам или на оптоволоконном уровне. Биты данных одномоментно превращаются в кадры (подобие ограниченных порций). Есть сложная схема разделения кадров на доминантные и рецессивные и приоритетов формирования очереди передачи, с применением арбитража. Однако в эти области высоких технологий, простому автолюбителю заглядывать нет никакой нужды.
На физическом уровне CAN-сеть – это непрерывная «шина» дифференциальной пары, в роли проводника информации, прописанной стандартом ISO. Доступ к ней осуществляется посредством драйвера CAN-шины.

Во всех системах современного автомобиля применяется протокол CAN для взаимодействия электронного блока управления с контрольными блоками систем, исполнительными устройствами, датчиками, и в целом всей совокупности периферийного оборудования. Устройство столь умного прибора, на удивление, очень простое (можно сказать примитивное) – два провода и чип. Вот и все!
Первые поколения прибора были снабжены множеством выходов, по каждому их которых передавался лишь один сигнал. Сейчас, по каждому проводу проходят сотни импульсов.
В последних выпусках есть функции подключения к смартфонам.
Есть заложенная функция предвидения и устранения некоторых неполадок электрооборудования автомобиля. Даже электробрелки зажигания, подключаясь через CAN, получают необходимые данные от ЭБУ автомобиля.
CAN – шина, практически, абсолютно нечувствительна к радиопомехам, с высокой степени изолированными контактами.
Передача данных по Кан-шине
Сигналы с электронных приборов, параллельно соединенных в цепь Кан-шины, по двум сплетенным проводам (витой паре), поступает на полосы шины. При этом, на каждом проводе будет свое напряжение, отличное от напряжения во втором проводе.
Другие участники считывают эту информацию. Путем проставления фильтров и идентификаторов, зашифрованных в самом послании, определяется адресат сообщения.
Тот, получив наказ на какое-либо действие, спешит его выполнить.
В покое, напряжение в проводах витой пары одинаковое и составляет 2,5В. Это, так называемое, рецессивное положение. Во время начала сеанса, провода приводятся в возбуждение участником, посылающим сообщение. Напряжение на одном из проводов (CAN High) начинает возрастать, достигая 3,5В. На другом (CAN low) – убывать, до достижения отметки 1В.
Каждое звено общей цепи подключается к CAN кабелю посредством трансивера, в котором разность двух напряжений преобразуется в одно, выходное (2В). Его и получают участники процесса. Таким образом, исключается влияние на обмен информации, непостоянство напряжения электрической сети автомобиля.
Обзор возможностей протокола CAN
- Продукты — микросхема, инструменты разработки, модули, инструменты проектирования;
- Распределение посланий — каждый участник будет иметь возможность выбирать к просмотру сообщения, касающиеся только его. Для этого предусмотрены фильтры;
- Широковещательный характер – если участник не выбрал только свои сообщения, то он имеет возможность просмотра всего потока информации;
- Контентная адресация – нет явного адресата. Выбираются адреса контента по идентификатору в самом сообщении;
- Виды сообщений – кадр данных, удаленный, ошибки, перезагрузки;
- СтандартныйCANи его расширенная версия – отличаются длиной установленного идентификатора. Если в станд. варианте он равен 11битам, то в его «толстом» собрате – 29 бит;
- Конфликтное разрешение и определение приоритета – чтобы избежать одновременной передачи данных несколькими участниками, выработан арбитражный механизм. Все пакеты поделены на доминантный и рецессивный. Не вдаваясь в подробности, отметим только, что всегда приоритет на стороне доминантного сообщения.
- Физические уровни:
— сигнальная сбалансированная двухпроводная схема high–speed CAN представляет вторую часть стандарта ISO 11898;
— третья часть ISO 11898 составляет следующий уровень вышеназванной схемы;
— однопроводной уровень, описываемый стандартом SAE J2411. Шины этого уровня установлены, например, на автомобилях линейки Дженерал Моторс.
- Прерывание конца – CAN-шина должна содержать на конце резисторное сопротивление (120ОМ), для гашения отражения сигнала, создания уровня постоянного тока.
- Кабель – сопротивление должно укладываться в интервал 108 – 132ОМ.
- Разъем – нет стандартов для разъемов CAN. Каждый протокол описывает свои предпочтения. Однако есть фактический стандарт для автопромышленности.
- Ошибка – контролер найдет ее и отметит флажком, разрушая передачу. Эти флажки станут знаком для всех участников цепи на ее сброс.
- Сбои в передачи – при различных сбоях дается возможность дальнейшего функционирования. Сбои могут быть разного характера: прерывание, короткое замыкание в разных частях, разъединение с оконечным сопротивлением.
Скорость передачи данных CAN-шины
Все составляющие сети CAN должны иметь единую скорость передачи информации. Однако данный стандарт не задает одного определенного параметра, ограничиваясь лишь максимальным пределом – 1Мбит/с. Изменения объема передаваемого кадра должно успеть распространиться по всей длине сети, что ставит в обратную зависимость скорости от протяженности – чем длиннее провод, тем ниже скорость. Для передачи 1Мбита за 1секунду нужная длина должна составлять не менее 40 метров. Добавьте к этому объективные факторы, снижающие скорость – защита от помех и разветвленная сеть, где происходят множественные отражения сигнала.
В угоду ускорения процесса, разработчики уменьшают протяженность проводов, одновременно увеличивая число цепей, с возможностью подключения большего количества приборов. Например, общая длина шины, составляющая 10 метров, способна пропускать через себя кадры, со скоростью 2 Мбит/c, с 64 подключенными приборами. Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две, и т. д. цепи.
Протоколы высокого уровня
CAN всего лишь решает проблему доставки информации из одного пункта в другой, малыми пакетами (всего 8 байт). Многие аспекты обмена данных, остаются вне его компетенции. Ввиду большого спроса на рынке, незамедлительно, появились разработки усовершенствованных протоколов – так называемые, протоколы высокого уровня. Они взялись оказывать более расширенный пакет услуг. Ими пользуются, когда нужно:
- Задать стандарты запуска, в т.ч. скорости обмена;
- Распределение, предварительно распознанных, адресов взаимодействующих элементов и видов сообщений;
- Точная разметка послания;
- Порядок разбора ошибок.
Достоинства и недостатки протокола CAN
Протокол CAN вошел в состав стандартного протокола OBD-II.
К несомненным преимуществам CAN относятся:
- Передача информации в реальном времени;
- Простота и дешевизна использования;
- Помехоустойчивость;
- Обеспечение доступа, путем арбитража, без снижения пропускных характеристик сети;
- Контроль всех ошибок обмена данных;
- Большой интервал рабочих скоростей;
- Широкое его применение, большое разнообразие ассортимента от разных поставщиков.
К недостаткам относятся:
- Маленький объем одного пакета данных, который составляет не более 8 байт;
- Служебные данные занимают больше объема, чем передаваемые, что значительно влияет на скорость (разработчикам есть куда расширяться);
- Нет общего стандарта на протоколы повышенного уровня. В CAN можно прописать любой протокол, если его исполнение помещается в рамках пропускной способности CAN.
Применяется этот протокол не только в автомобильной промышленности. В некоторых отраслях промышленности, дорожного строительства, при строительстве высокотехнологичных объектов (так называемые, умные дома), в велосипедном производстве.
Новичку о подключении к CAN шине
Для работы с CAN шиной автомобиля необходимо знать:
CAN шина – это сеть обмена данными определенная в стандарте ISO 11898. Другие каналы обмена данными в автомобиле не могут быть названы CAN шиной. AVC-LAN, BEAN, J1708, VAN и другие старые протоколы это НЕ CAN !
В автомобиле может быть более одной CAN шины. Для каждого функционального сегмента автомобиля выделяется своя сеть CAN. Выделенные сети могут работать на разных скоростях.
Скорости работы CAN шины
CAN на разных автомобилях и в разных сегментах сети может работать на разных скоростях.
Названия сегментов сети: Мотор, Шасси, Комфорт, Салон – условны! У Каждого автопроизводителя свои названия этих участков сети!
- Группа VAG: Моторшасси – 500 кбитс, Комфорт – 100 кбитс и с 2018 года шина Комфорт может иметь скорость 500 кбитс., Диагностика: 500 кбитс.
- BMW : МоторШасси – 500кбитс, Комфорт – 100 кбитс и с 2018 года шина Комфорт может иметь скорость 500 кбитс., Диагностика: 500 кбитс.
- Mercedes-Benz : МоторШасси – 500 кбитс, Комфорт 83.333 кбитс, 250 кбитс, Диагностика: 500 кбитс.
- Ford, Mazda : МоторШасси – 500 кбитс, Комфорт 125 кбитс. (Для Ford может быть больше вариантов)
- KIAHyundai : МоторШасси – 500 кбитс, Комфорт 125 кбитс, 500 кбитс, Мультимедиа: 125 кбитс, 500 кбитс., Диагностика: 500 кбитс.
- GM : МоторШасси – 500 кбитс, Комфорт: 33.333 кбитс, 95.2 кбитс, Диагностика: 500 кбитс.
- Toyota, Nissan, Honda, Subaru, Suzuki : 500 кбитс (может использоваться гейтвей)
- Mitsubishi : МоторШасси: 500 кбитс, СалонКомфорт – 83.333 кбитс, 250 кбитс, Диагностика: 500 кбитс.
- Volvo : МоторШасси: 500 кбитс, СалонКомфорт – 500 кбитс, 125 кбитс, Диагностика: 500 кбитс.
- Renault : 500 кбитс
- Peugeot : МоторШасси – 500 кбитс, Комфорт 125 кбитс.
- Lada : 500 кбитс
- Коммерческая и специальная техника : Стандарт J1939 250 или 500 кбитс.
Сегментация CAN шины по функциональному назначению
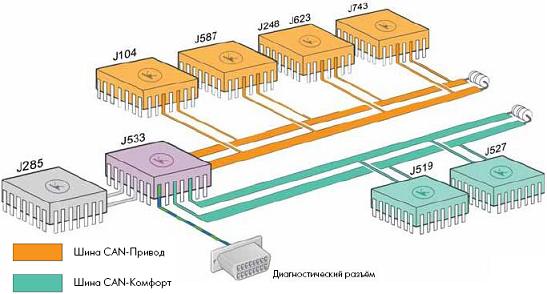
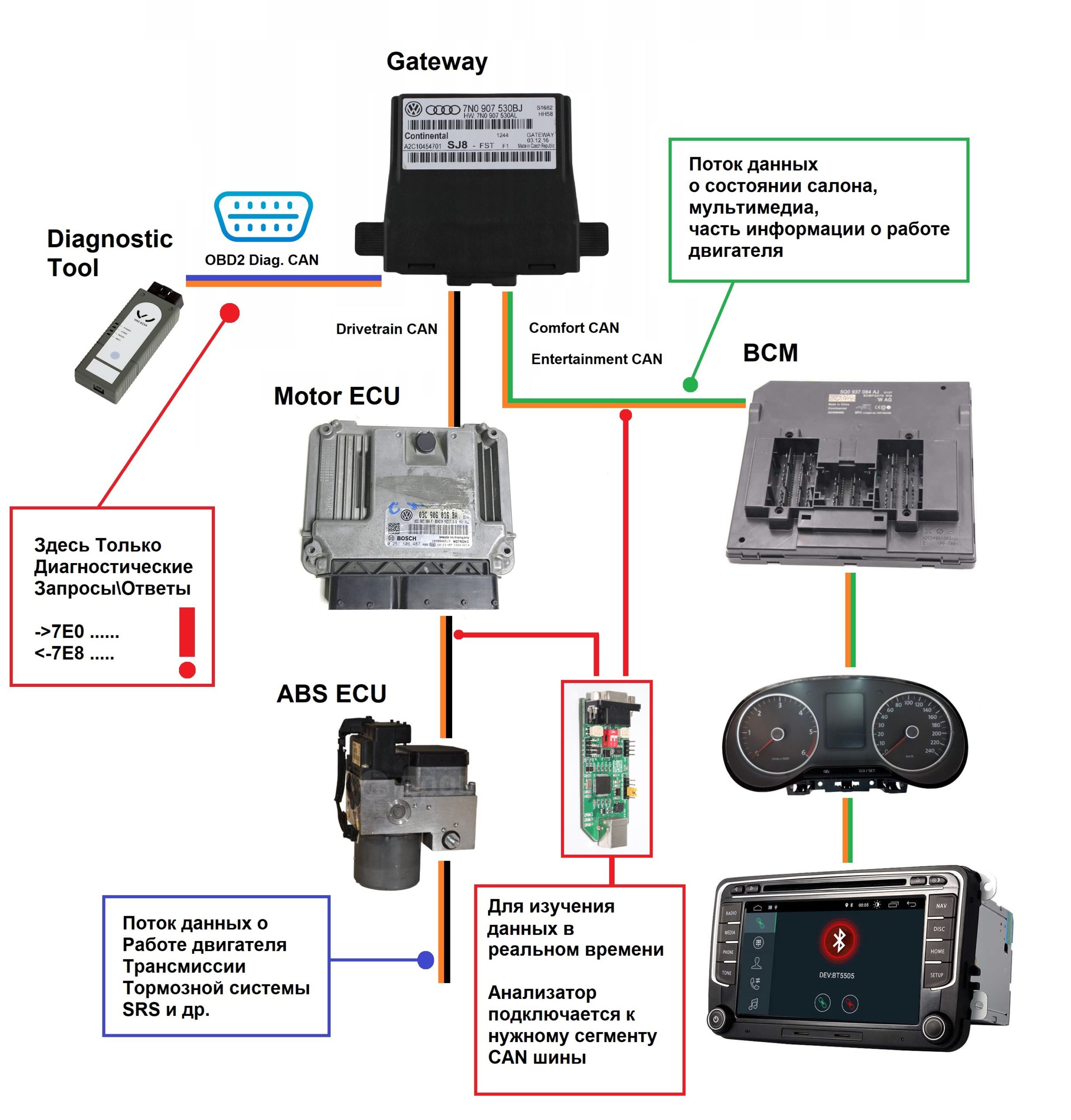
- Как правило разные, сегменты сети разделены специальным устройством, которое называется Гейтвей (Gateway, ZGW, ETACS, ICU) .
- В роли гейтвея может выступать панель приборов (для простых автомобилей) или отдельный специальный модуль межсетевого интерфейса.
- Гейтвей разделяет потоки данных в разных сегментах сети и обеспечивает связь сегментов сети работающих на разных скоростях.
- ВАЖНО: На многих автомобилях (особенно VAG, MB, BMW) CAN шина в диагностическом разъеме OBD2 отделена от других участков сети при помощи гейтвея, поэтому подключившись к CAN шине OBD разъема невозможно увидеть поток данных. В этом случае можно увидеть только обмен между диагностическим инструментом и автомобилем во время процесса диагностики! Так же модулем гейтвеем оборудованы автомобили японских марок с 2016..2018 годов в зависимости от модели.
- ОБЯЗАТЕЛЬНО изучайте схемы на исследуемый автомобиль, чтобы знать к какому сегменту сети Вы подключаетесь!
Схема ниже изображена в общем виде для упрощения понимания роли Гейтвея. Количество CAN шин и варианты включения блоков управления к тому или другому сегменту сети могут отличаться.
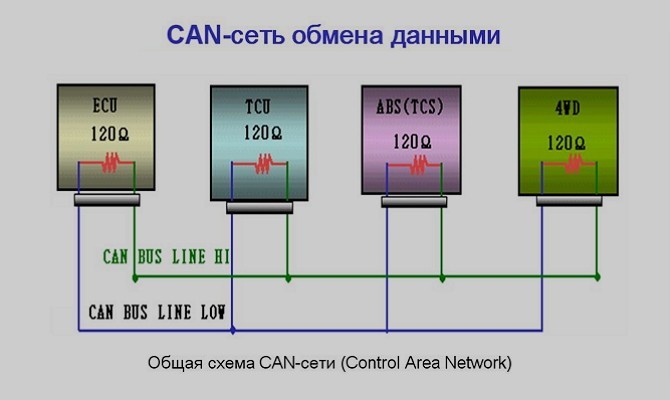
Реализации CAN на уровне электрических сигналов
CAN шина может быть реализована физически тремя способами:
1 ISO11898-2 или CAN-High Speed.
Классическая витая пара нагруженная с обоих концов резисторами 120 Ом. 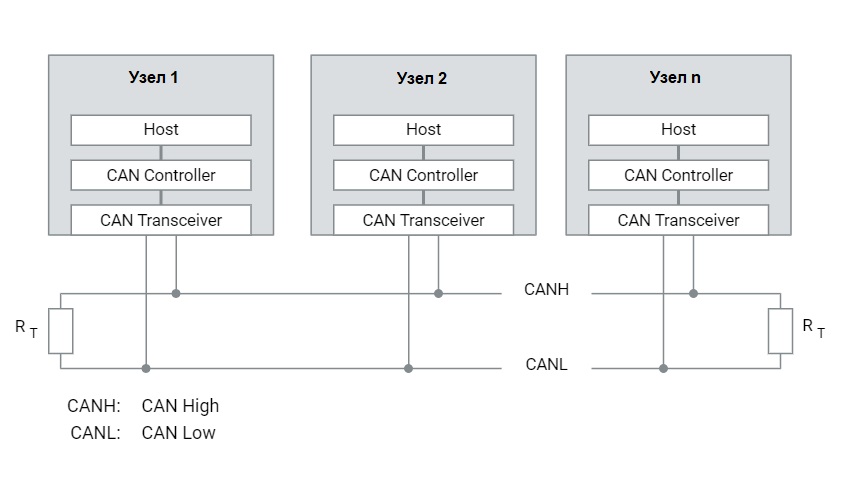
В этом случае уровни на шине CAN выглядят так: 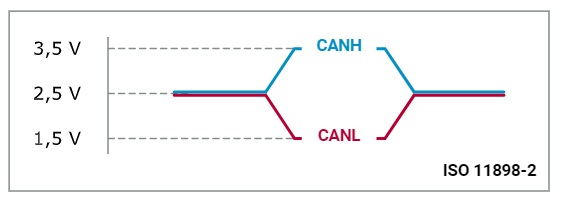
Для такой реализации сети используются как правило обычные CAN трансиверы в 8 выводном корпусе, аналоги PCA82C250, TJA1050 и им подобные. Работает такая конфигурация на скоростях 500 кбитс и выше. (Но могут быть исключения) .
2 ISO11898-3 или CAN-Low Speed или Faut Tolerant CAN
В этом варианте используется та же витая пара, но линии CAN-Low и CAN-High подтянуты к напряжению питания и массе соответственно.
Подробное описание FT-CAN по ссылке
Такой вариант CAN шины способен переключаться в однопроводный режим в случае повреждения одной из линий. Работает на скоростях до 250 кбитс.Уровни сигнала на шине отличаются от High Speed CAN, при этом не теряется возможность работы с шиной FT-CAN используя трансиверы High-Speed CAN и соблюдая ряд условий.
Подробнее в нашей статье о FT-CAN – ссылка. 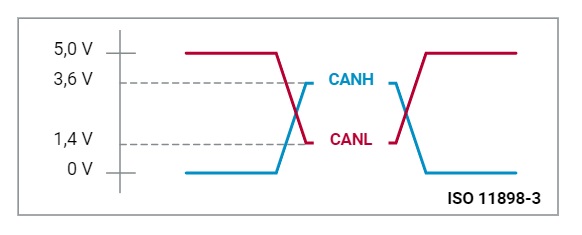
Fault tolerant CAN обычно используется для низкоскоростного обмена между блоками управления относящимися к сегменту сети СалонКомфортМультимедиа.
ВАЖНО: При подключении к шине Faul tolerant CAN, подключать терминальный резистор 120 Ом между линиями CAN-High и CAN-Low НЕ НУЖНО !
3 Single Wire CAN или SW-CAN
Однопроводный вариант шины CAN. Работает на скорости 33.333 кбитс
Используется специальный тип трансиверов. Для того что бы подключиться к такому варианту шины CAN необходимо линию CAN-High анализатора подключить к шине SW-CAN а линию CAN-Low к массеземле. 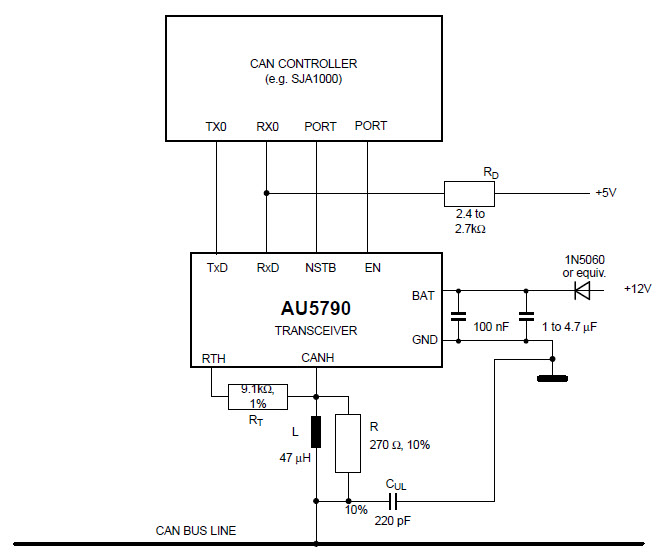
Источник https://elm327.club/diagnostika-avto/can-shina.html
Источник https://canhacker.ru/cannewbie/
Источник
Источник